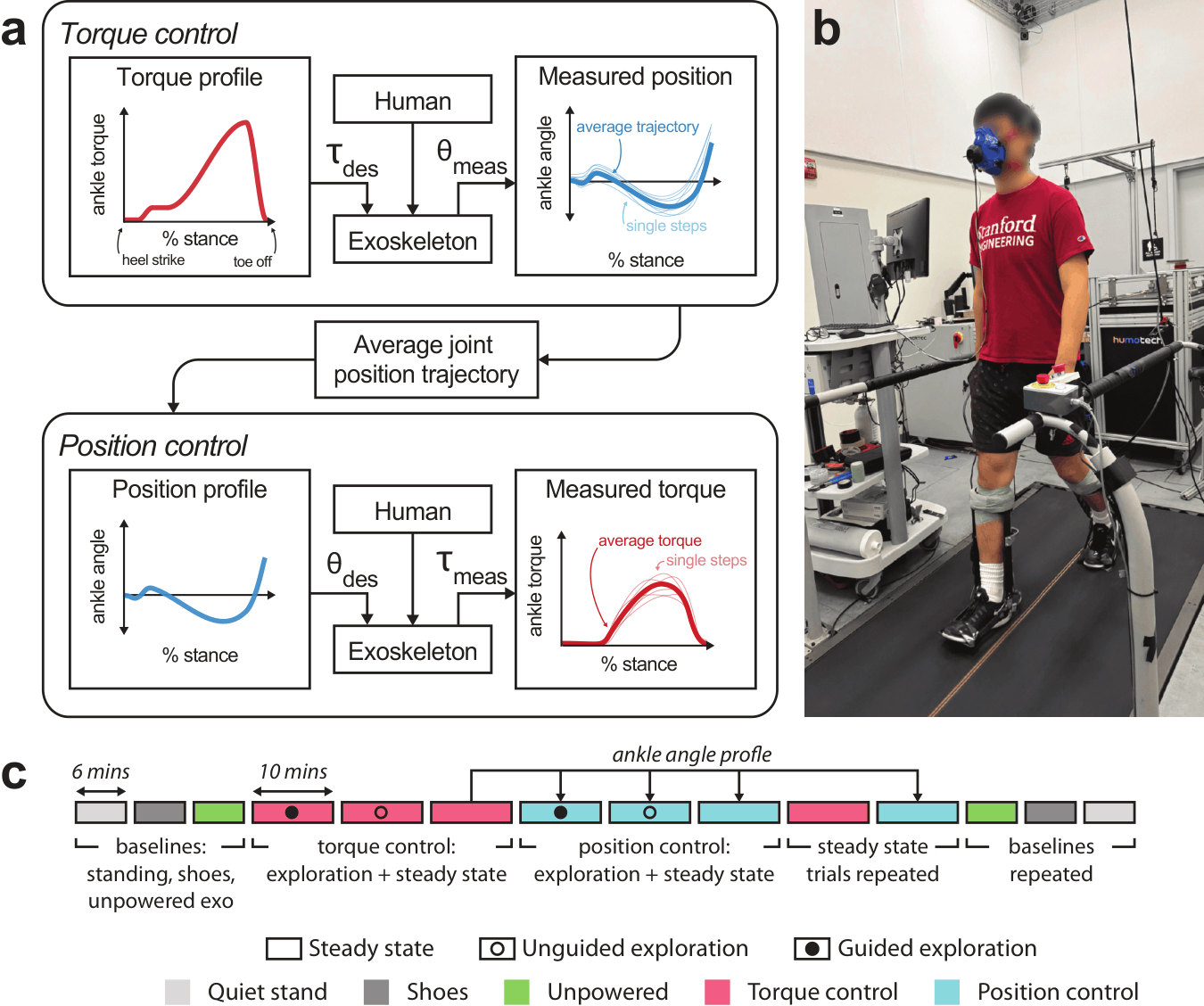
Lower-limb exoskeletons are typically controlled
using either torque control, where per-stride joint torques are
specified and kinematics emerge through user-device interaction,
or position control, in which joint kinematics are specified and
torques emerge. Here, we compare these strategies in an ankle
exoskeleton with ten experienced exoskeleton users. Participants
first walked using a torque control profile previously shown to
substantially reduce metabolic rate. Using the measured stance
phase kinematics from torque control, participants next walked
with position control, which enforced the same kinematics as
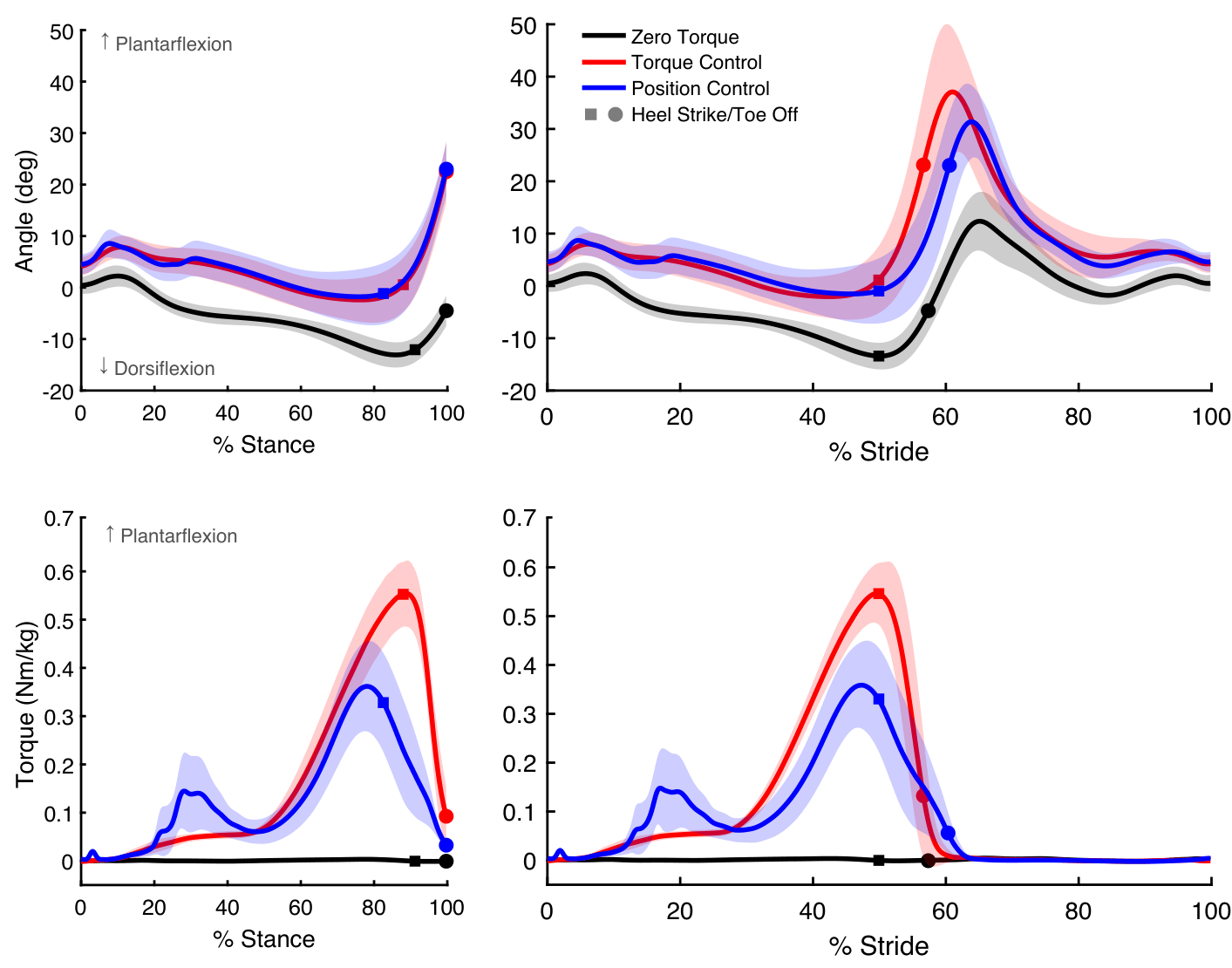
a function of percent stance. We found that, despite matched
kinematics, kinetics differed: peak exoskeleton torque was 50%
greater and occurred 10% later in stance with torque control
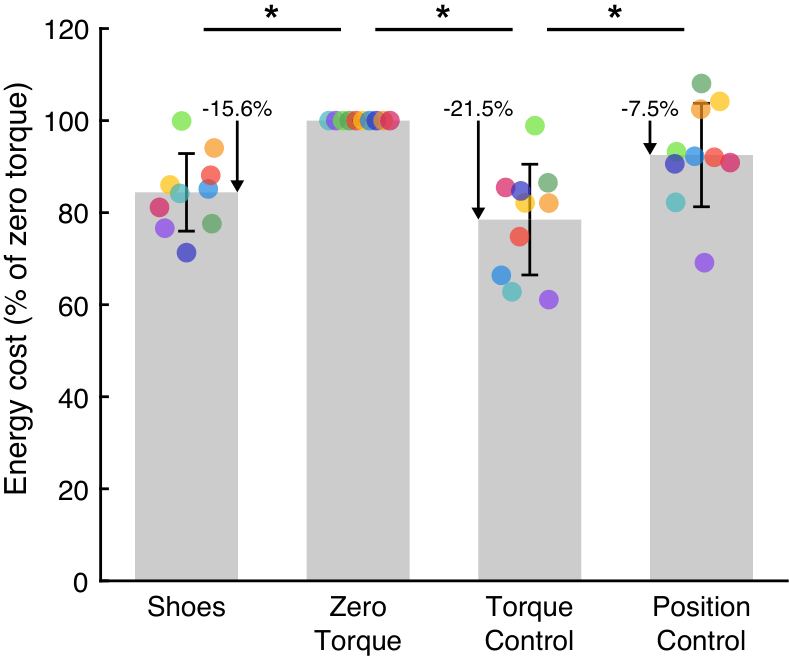
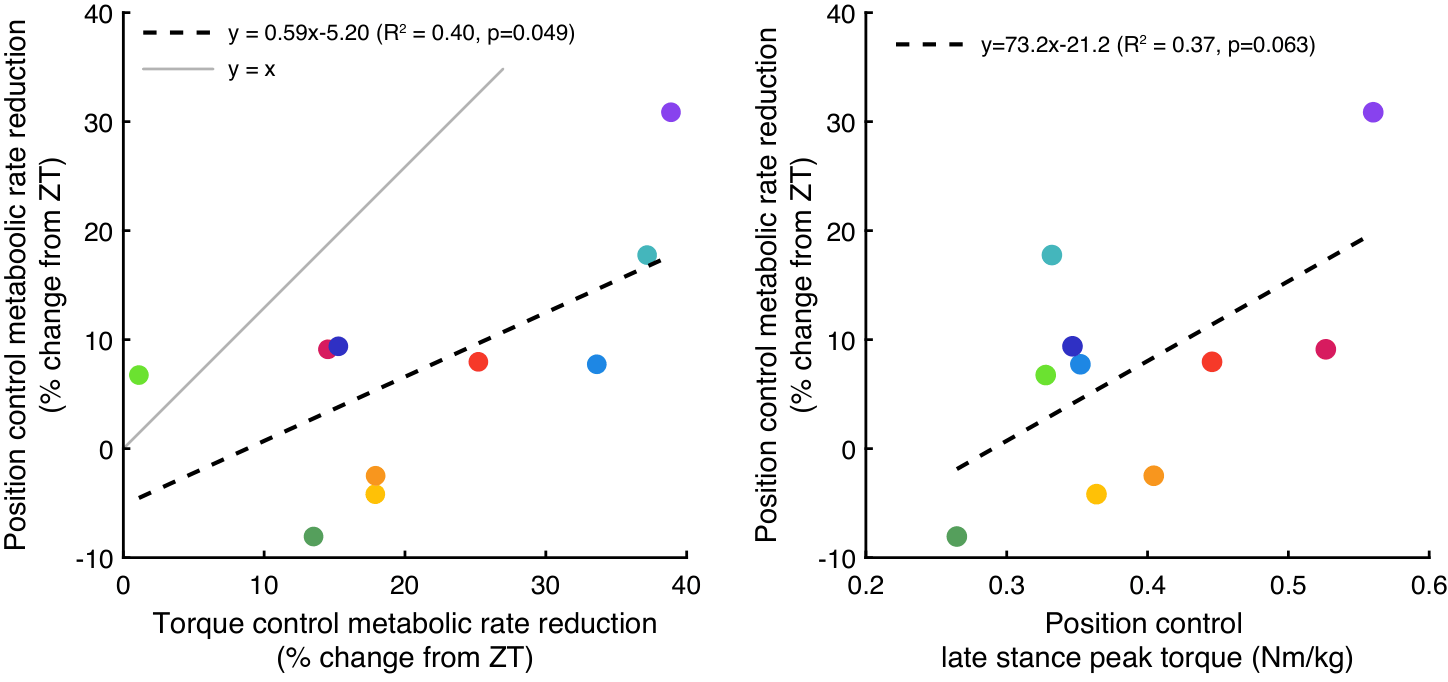
than with position control. The metabolic rate reduction relative
to walking in the device unpowered was 22% for torque control
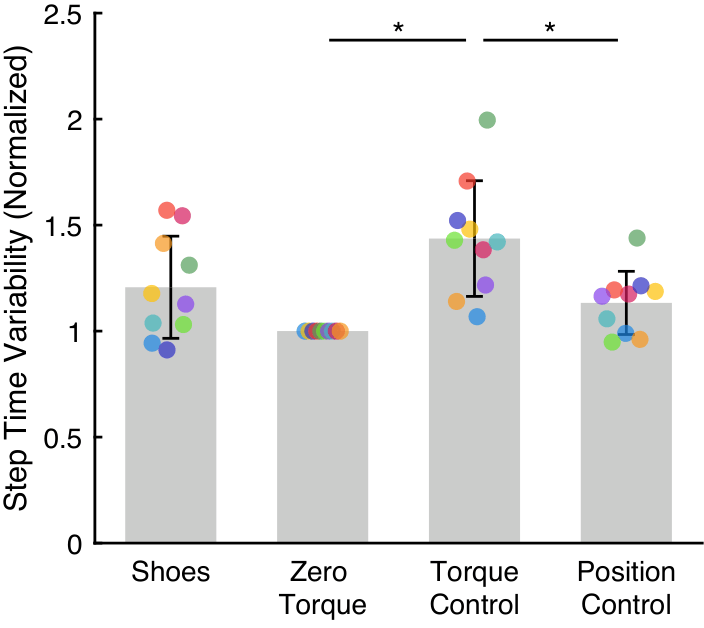
and 8% for position control. Step time variability was 27% larger
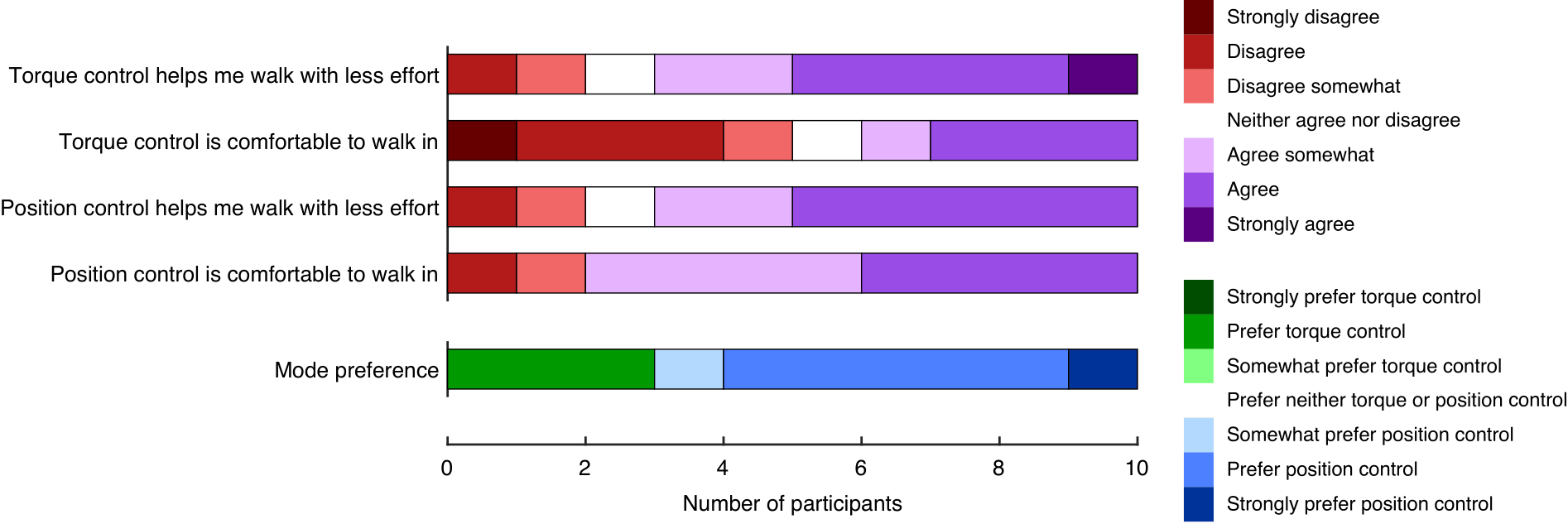
with torque control versus position control. Most participants (7
of 10) preferred the position controller, reporting differences in
perceived comfort but not effort. Even with matched kinematics,
position and torque control interact with users in ways that result
in significant differences in kinetics, energy economy, balance,
and comfort, and both controllers offer potential benefits that
merit further study.